| |
Willkommen beim Projekt "Pedale Fortbewegung" !!!
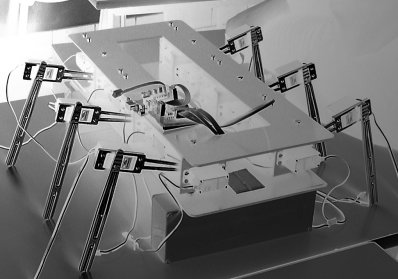
Unser Projekt ist im Grunde eine sechsbeinige Laufmaschine, die
den Grundprinzipien einer Stabheuschrecke nachempfunden ist.
Nähere Infos:
-Wie bewegt sich diese Laufmaschine?
Um die 6 Beine überhaupt bewegen zu können, benötigt es eine
Menge an Kraft. Diese wird durch 18 so genannte "Servomotoren" erzeugt.
-Wie steuert man diese Laufmaschine?
Da die oben erwähnten Servomotore eine ziemliche Eigenheit
besitzen (sie "reagieren" nur auf Rechtecksignale), muss man so Einiges
beachten. Wir versuchen über die serielle Schnittstelle des Computers, Signale
auszusenden, die dann über einen Mikrocomputer (Max232) gesandt werden, welcher
die nötigen Rechtecksignale herstellt. Über diesen Mikrocomputer werden die
passenden Signale an einen Servocontroller namens "SD20" gesandt, wo nun alle 18
Servos angeschlossen sind.
-Wie funktioniert die Versorgung für soviele Servos und der
dazugehörigen Schaltung?
Die Grundversorgung beträgt 10V, die für z.B. den Servocontroller aber auf 5V
abgesenkt werden muss. Dies geschieht über Spannungswandler. Die Versorgung
selbst kann entweder über ein Netzteil, aber auch über passende Akkus realisiert
werden.
INFO: Alle Schaltungen und fertigen Layouts finden Sie in der Rubrik "Elektrinik".
-Sind die mechanischen Komponenten maschinell gefertigt?
Teils ja, teils nein. Natürlich haben wir das einzigartige
Equipment der mechanischen Werkstätten genutzt, so viele Bestandteile der
Laufmaschine maschinell herzustellen. Spezielle Teile mussten jedoch händisch
nachgebessert werden.
INFO: Alle technischen Zeichnungen, sowie alle nötigen CNC-Programme können
unter "Baupläne" links im Menü heruntergeladen werden.
-Was ist solch eine Laufmaschine wert? Bzw. was kostet die
Herstellung?
Ehrlich gesagt, ist sie für uns eigentlich unbezahlbar ;-)
Da wir jedoch nächstes Jahr mit noch mehr HighTech versuchen werden, den Unis
mit ihren Robotern Paroli zu bieten, benötigen wir weit mehr Geld als dieses
Jahr.
Die Gesamtkosten beliefen sich dieses Jahr bei ungefähr 800€, wobei wir beim
Material einige "Spender" hatten. Wer solch eine Laufmaschine nach unserem
Muster selbst bauen möchte, kann gut und gerne 1500€ einrechnen (Schweiß und
Ärger exklusive). Wer unsere Laufmaschine kaufen möchte und damit die
Laufmaschine für nächstes Jahr mitfinanzieren möchte, kann uns gerne
kontaktieren
MAIL: info@sejk.de
-Ich will auf dem Laufenden bezüglich der neuen Laufmaschine
bleiben. Gibt es einen Newsletter?
Ja, gibt es. Einfach auf info@sejk.de melden!
|